Overview
1 Visual Active Tracking
VAT Task
Real-world Task: A real-world visual task where the target exhibits high dynamic characteristics. The main challenge is actively controlling the camera to improve visual accuracy.
Existing Methods: Existing PVT (Passive Visual Tracking) methods are based on the assumption that the target remains within a preset frame, only tracking in the video.
VAT Task: VAT (Visual Active Tracking) simultaneously models visual tracking and control, achieving active camera control to track dynamic targets, making it more realistic.
Differences between VAT Tasks and PVT Settings
VAT Scheme
Existing VAT Scheme: Directly connect the VT model and the control model for VAT (e.g., siamask+PID)
Limitation 1: The visual model requires a lot of manual labeling
Limitation 2: The control model is sensitive to parameters and requires parameter fine-tuning for each different scenario
This Project’s VAT Scheme: Use MDP (Markov Decision Process) to model both visual and control tasks simultaneously, solving visual and control tasks with a single model
Advantage: End-to-end RL is more efficient and better suited for cross-scenario tasks
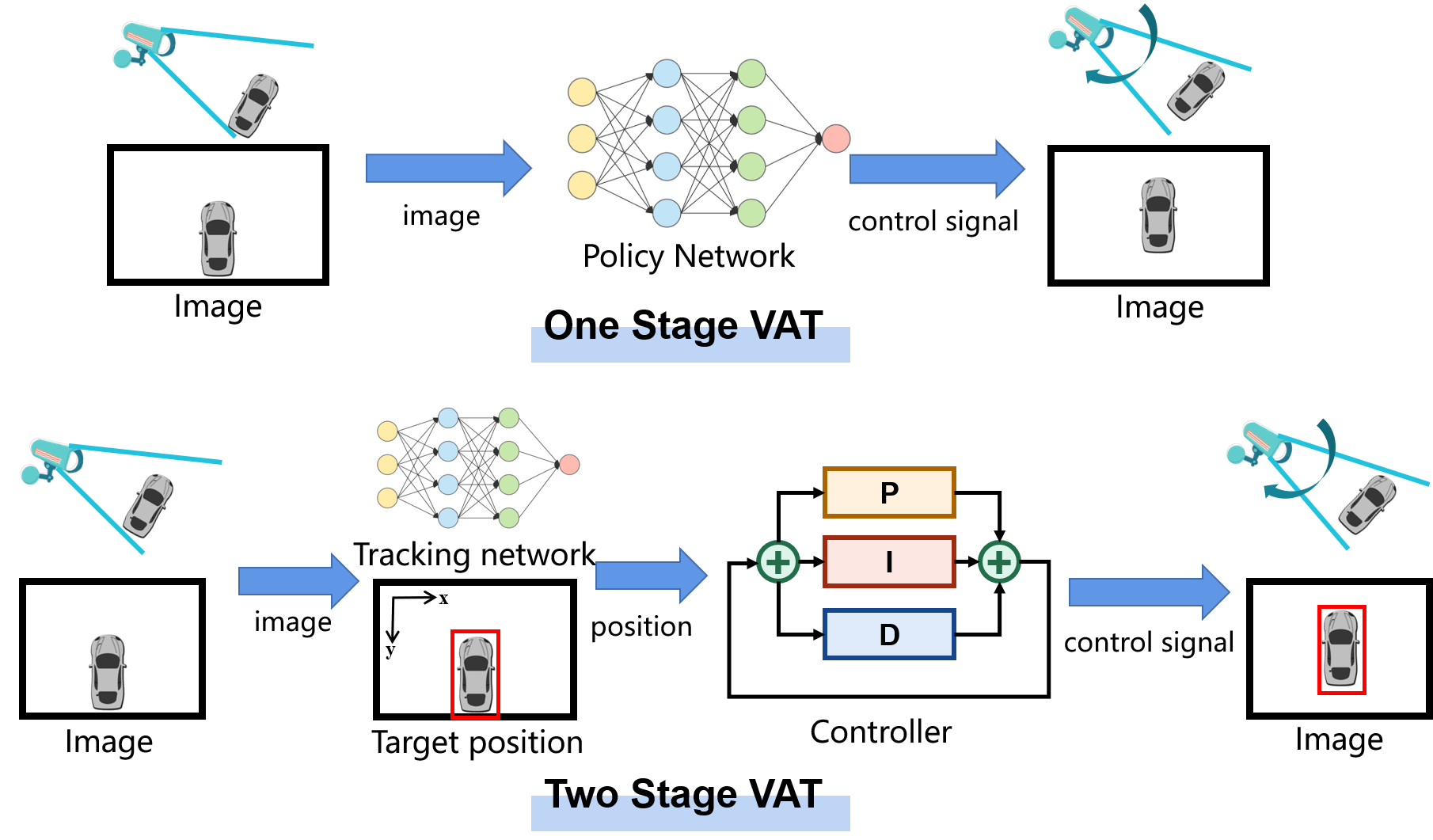
Single-Stage and Two-Stage VAT Scheme Illustration
2 Benchmark Presentation
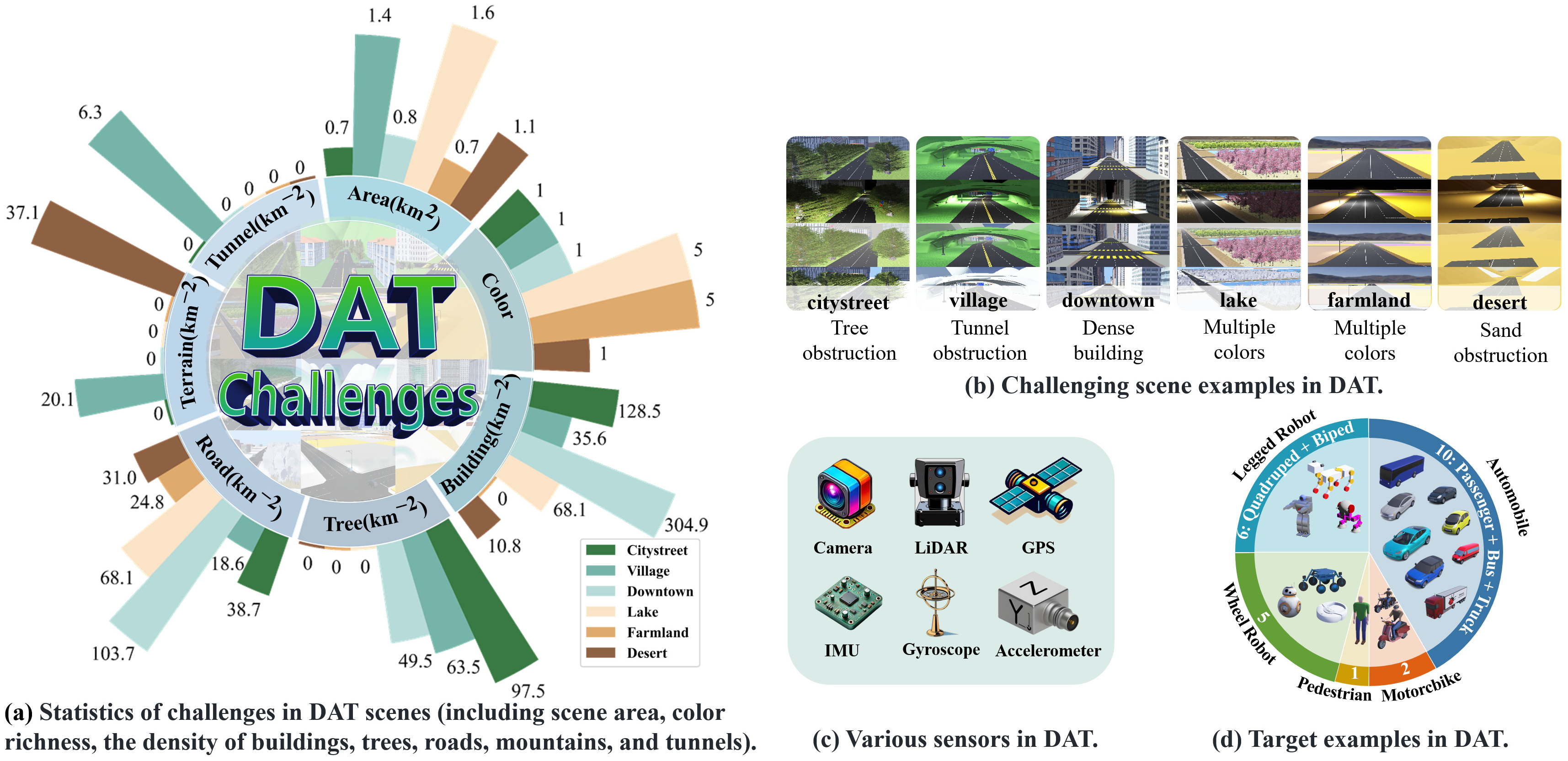
Statistics and simulator component examples of the DAT
Diverse and Complex Scenarios:
Diverse Scenario Settings: Featuring a total of 24 environments combining 6 scenarios and 4 weather conditions. As shown in Figure Schematic diagram of 24 open scenes
Complex Scenario Elements: The complexity of the real scene is constructed from 7 aspects, including scene area(\(km^{2}\)), building density(\(km^{-2}\)), color richness, road density(\(km^{-2}\)), terrain density(\(km^{-2}\)), tree density(\(km^{-2}\)), and tunnel density(\(km^{-2}\)). The scene statistics are shown in Figure (a) above, and the difficult elements are shown in Figure (b) above. Specifically, the scene area refers to the extent of the scene, building density is the ratio of the number of buildings to the scene area, and color richness is the number of dominant colors in the scene. These three aspects primarily depict the complexity of the visual background. Road density is measured by evaluating the density of complex elements such as turns, intersections, and pedestrian crossings, while terrain density is determined by assessing the density of special terrain features like mountains in the scene. These two aspects primarily depict the complexity of tracking target behavior. Additionally, tree density and tunnel density are calculated as the ratio of the number of trees and tunnels to the scene area, respectively, and are used to measure the level of visual occlusion within the scene.
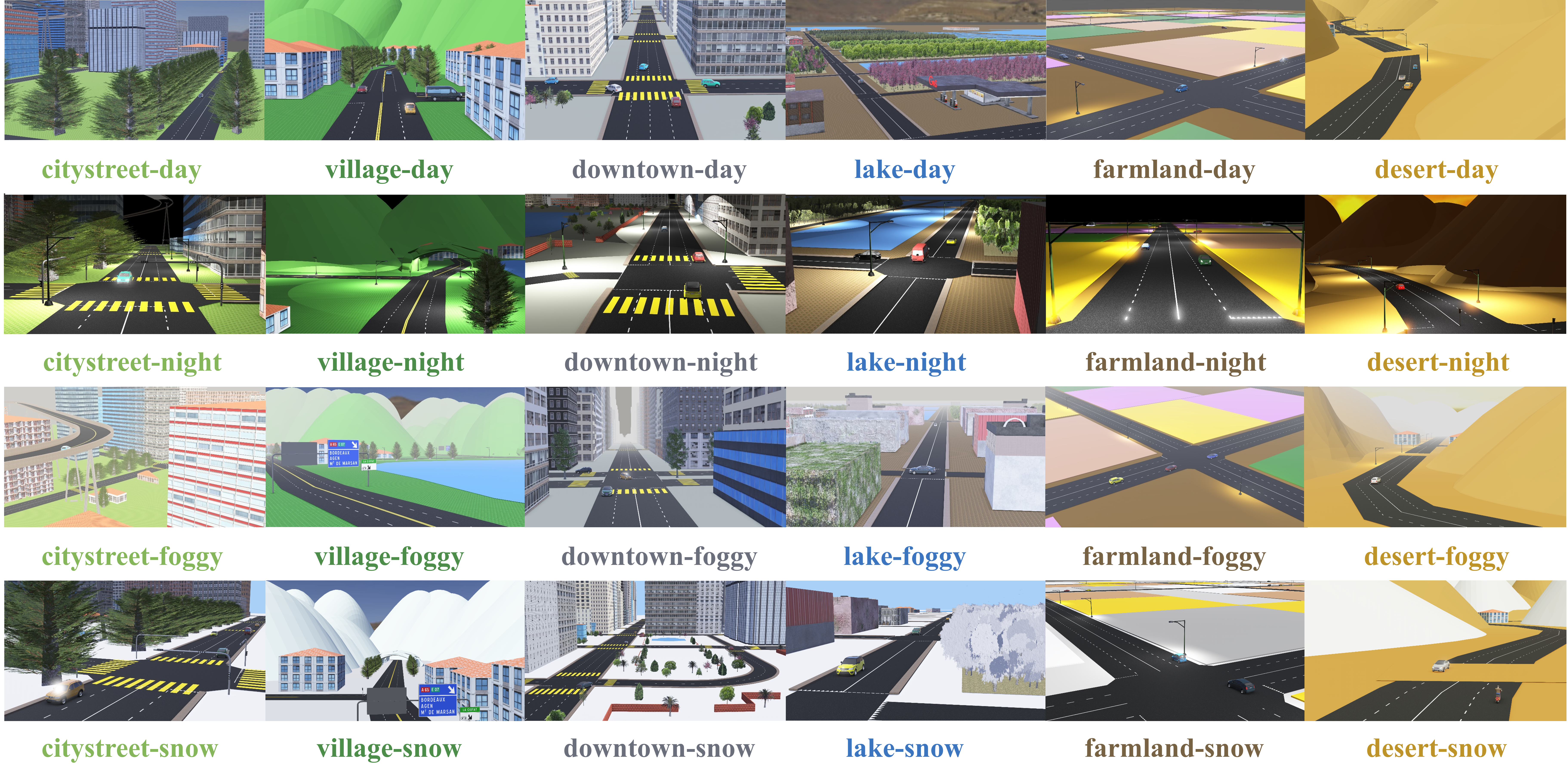
Schematic diagram of 24 open scenes
Rich and Diverse Trackers and Targets:
Diverse Trackers: Pre-set ground robots and drones as Trackers, with support for autonomous model integration of ground robots.
Diverse Targets: There are 24 pre-set targets to support autonomous model access, as shown in Figure Statistics and simulator component examples of the DAT (d) above. For details on tracking target objects, see: Tracked Objects
Real and Rich Behavior management: Integrated with the traffic simulator SUMO for unified vehicle management, ensuring the authenticity and randomness of Target movements within the environment.
Flexible and Customizable Task Settings:
Multi-sensor: Equipped with 6 common visual and motion sensors, as shown in Figure Statistics and simulator component examples of the DAT (c) above.
Customizable Task Parameters: The task is highly extensible, and the additional task parameters are customized. For diverse task configurations, see: Customized Parameter Interface